- Merangkai aplikasi incremental encoder untuk menghitung jarak motor dari posisi awal
A. Motor
B. Switch
C. Arduino
D. LCD
E. Buffer gate
F. Resistor
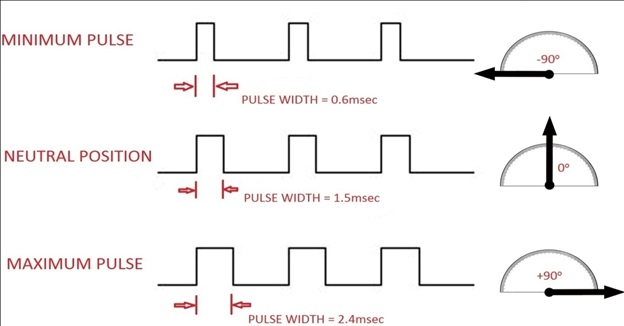
A. Motor
Motor servo adalah sebuah perangkat atau aktuator putar (motor) yang dirancang dengan sistem kontrol umpan balik loop tertutup (servo),Sehingga dapat di set-up atau di atur untuk menentukan dan memastikan posisi sudut dan poros output motor
B. Switch
Sakelar atau switch adalah suatu komponen yang di gunakan untuk membuka atau menutup suatu rangkaian (elektronika maupun elektrik)
C. Arduino
Arduino Nano adalah salah satu papan pengembangan mikrokontroler yang berukuran kecil, lengkap dan mendukung penggunaan breadboard. Arduino Nano diciptakan dengan basis mikrokontroler ATmega328 (untuk Arduino Nano versi 3.x) atau ATmega 168 (untuk Arduino versi 2.x). Arduino Nano kurang lebih memiliki fungsi yang sama dengan Arduino Duemilanove, tetapi dalam paket yang berbeda. Arduino Nano tidak menyertakan colokan DC berjenis Barrel Jack, dan dihubungkan ke komputer menggunakan port USB Mini-B. Arduino Nano dirancang dan diproduksi oleh perusahaan Gravitech.
D. LCD
LCD atau Liquid Crystal Displayadalah suatu jenis media display (tampilan) yang menggunakan kristal cair (liquid crystal) untuk menghasilkan gambar yang terlihat
E. Buffer Gate
Three-state buffer adalah sebuah alat yang memungkinkan kontrol terhadap signal keluaran (output) yang dibuat ke arah BUS. Ketika three-state buffer control sedang bekerja (aktif) , maka input dari alat akan mengarah ke arah output. Ketika keran nya terbuka.Ketika tidak sedang bekerja , keluarang dari alat adalah sebesar z, yang yang seimgand dengan 0, ketika keran sedang tertutup, dan tidak ada signal listrik yang diperbolehkan untuk melewati keluaran.
F. Resistor
Resistor adalah komponen elektronika yang berfungsi untuk menghambat atau membatasi aliran listrik yang mengalir dalam suatu rangkain elektronika. Sebagaimana fungsi resistoryang sesuai namanya bersifat resistif dan termasuk salah satu komponen elektronika dalam kategori komponen pasif. Satuan atau nilai resistansi suatu resistor di sebut Ohm dan dilambangkan dengan simbol Omega (Ω )
Grafik Respon
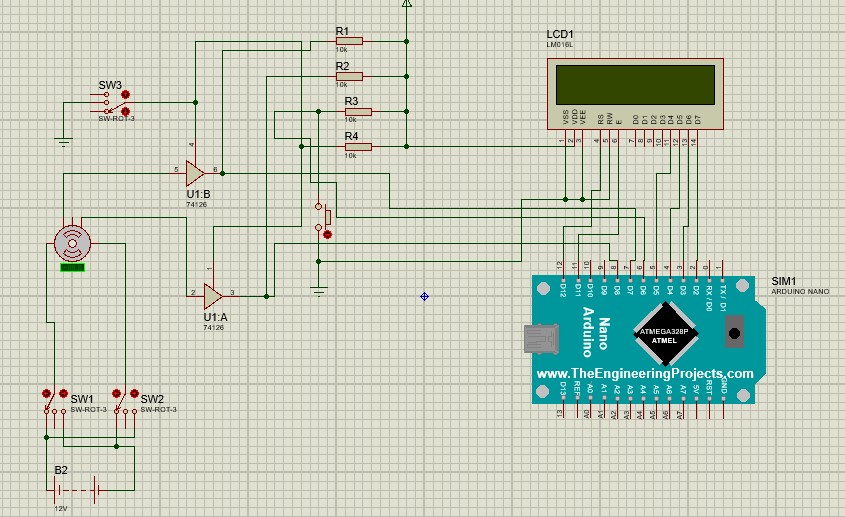
Sumber arus dihubungkan bagian negatif dan positif nya ke switch yang akan mengatur putaran motor maju atau mundur setelah itu dihubungkan ke buffer gate dimana fungsi buffer gate adalah untuk meningkatkan delay sinyal setelah itu diproses pada arduino dimana data tersebut akan dirubah dari nilai analog menjadi digital dimana arduino akan berfungsi sebagai counter untuk menghitung berapa kali putaran yang terjadi ke depan maupun kebelakang dan akan ditampilkan pada LCD 16x2 . Pada rangkaian terdapat switch yang berfungsi untuk mereset counter ke nol kembali
Rangkaian [Download]
[Datasheet]